泌尿传奇:泌尿外科机器人辅助手术的历史(上)

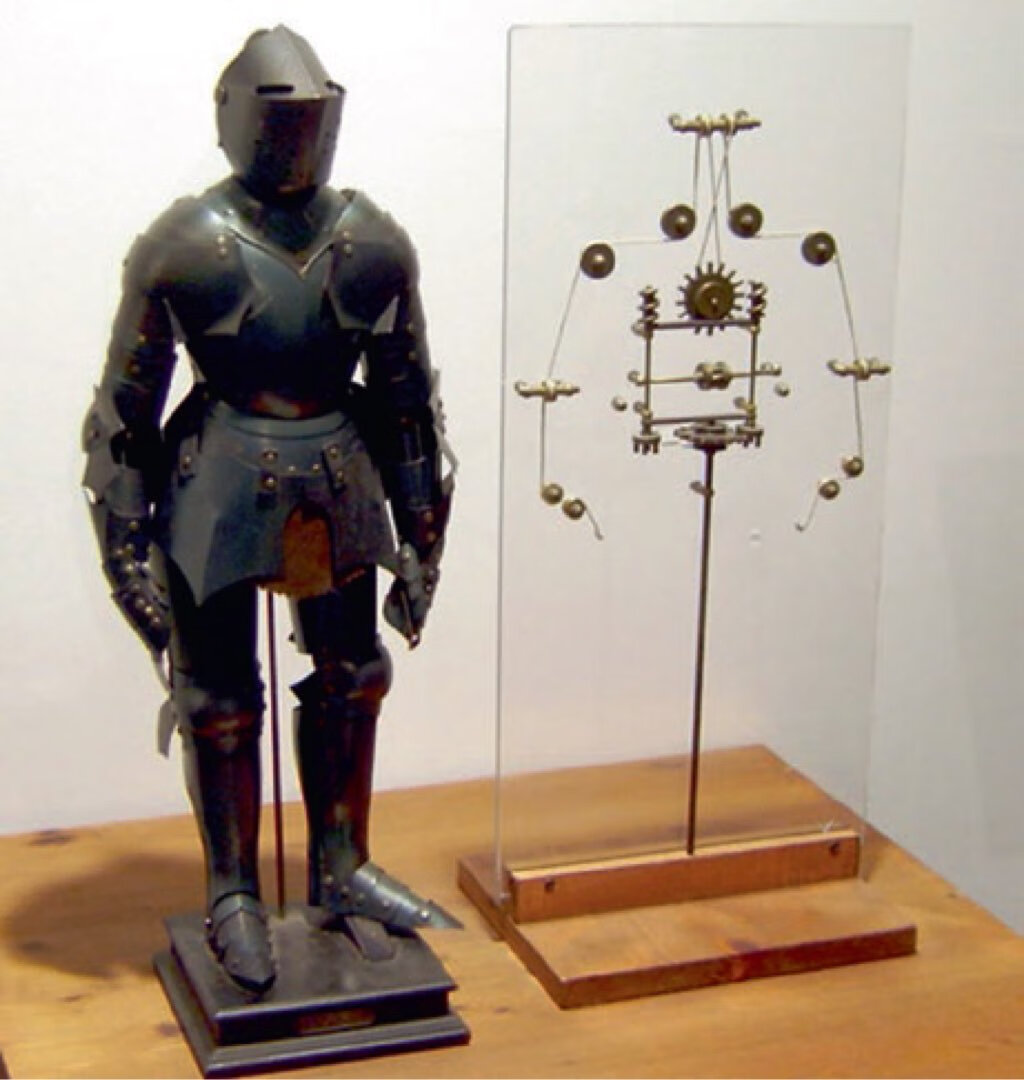
1495 年,意大利文艺复兴时期大师莱昂纳多 . 达芬奇,他设计了第 1 个机器人。 1950 年代,达芬奇设计手稿被发现 。 2002 年,按设计图复原了此机器人,可做几种人类动作,如坐、挥动手臂、转头和咬合。机器人 robot 一词,创造于 1923 年,捷克作家恰佩克 Karel Capek 出版了小说《罗素姆的万能机器 Rossum’s Universal Robots 》,首次出现 robot ,源于捷克语 robota ,原意指奴隶劳工,小说主人公制造了机器人,作为廉价劳力使用。后来这些机器人发展成高智力 ,有思想,认识到自已比人类先进,于是转而向人类宣战,要消灭人类。
1950 年代,现代工业机器人出现,美国优力美讯公司 Unimation 推出通用机械手,用于美国通用汽车的汽车装配生产线。 1980 年代,机器人进入外科 领域 。
美国宇航局 NASA 艾姆斯研究中心,与斯坦福研究学院 Stanford Research Institute ( SRI )的机械工程师合作研究虚拟现实系统。他们对机器人技术感兴趣,并进一步发展出远程呈现外科系统以提高显微外科的精确性。 1987 年,腹腔镜胆囊切除术出现后,他们将机器人技术从显微外科拓展到普通外科手术。包括外科医生控制台和远程操控装置的远程呈现系统开发成 功, 此项目由美国国防部资助。这些研究成果最终促进了达芬奇外科系统 da Vinci Surgical System 的诞生。
1984 年,加拿大温哥华的大不列颠哥伦比亚大学( UBC )医院, Arthrobot 用于骨科手术时,经声控辅助患者腿的操作和摆放,被认为是世界首次机器人辅助外科应用。 1985 年,在美国洛杉矶纪念医院 Memorial Hospital of Los Angeles ,优力美讯的 PUMA ( Programmable Universal Manipulation Arm ) 200 用于立体定位脑部活检术。 曾被认为是 机器人首次在外科应用,

1988 年,机器医生 ROBODOC 首次在全髋关节置换手术时,在股骨上钻孔。 ROBODOC 系统在美国、欧洲和亚洲共参与完成了 35000 例关节置换手术。

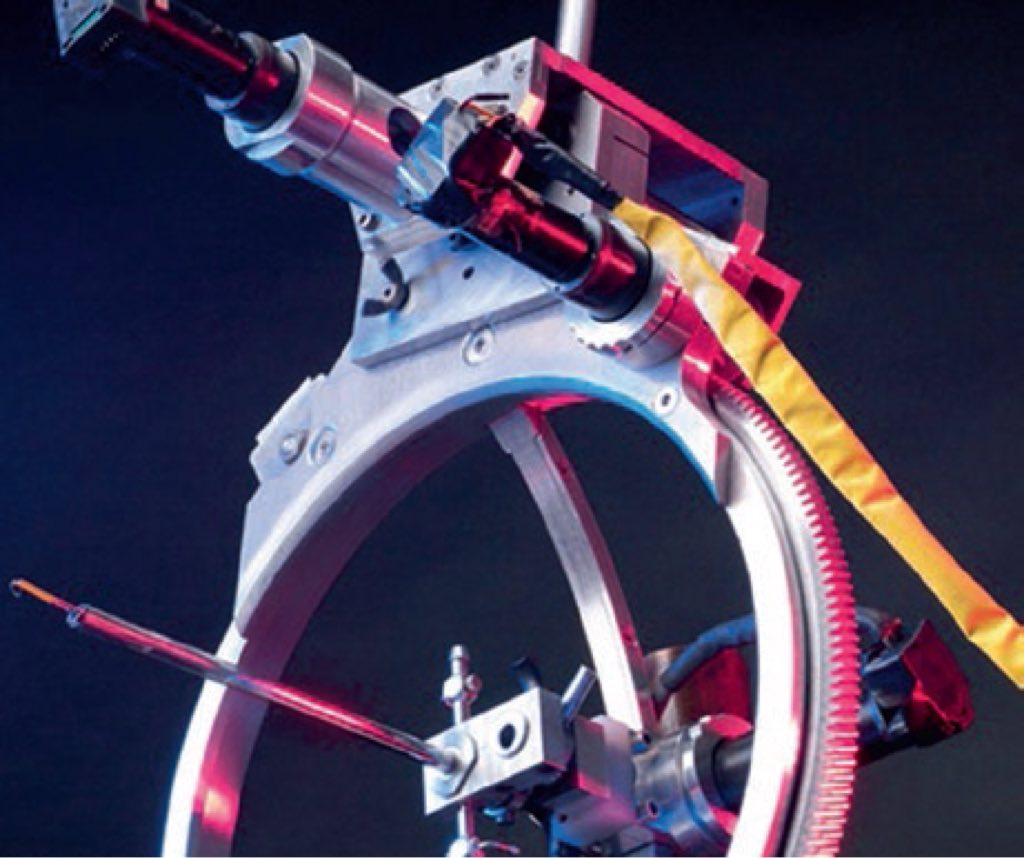
1988 年, PROBOT 完成了首例机器人辅助泌尿外科手术,在英国伦敦帝国学院,它用于完成经尿道 前列腺电切 手术。术前工作有: 测定膀胱颈至精阜距离,内镜超声建立前列腺三维模型,泌尿外科医师据此设计切除范围,由医生在工作站控制与调整切除参数,可在任何时候停止机器人工作。一旦机器人工作失败,可由手工操作完成。
机器人在腹腔镜手术的应用
1993 年,美国摩星公司 Computer Motion Inc. ( Santa Barbara, California )开发了 AESOP ( Automated Endoscope System for Op timal Positioning ),用于腹腔镜手术时控制镜头视野的机器臂。 可减少手术团队人数。提供稳定的手术视野,减少器械间的冲突。此机器臂有 7 个自由度( 7-DOF ),并完全由术者控制。 1994 上, AESOP 1000 成为首个被 FDA 批准的手术机器人,最初通过脚踏控制,后来 1996 年的 AESOP 2000 和 1998 年的 AESOP 3000

改为声控。
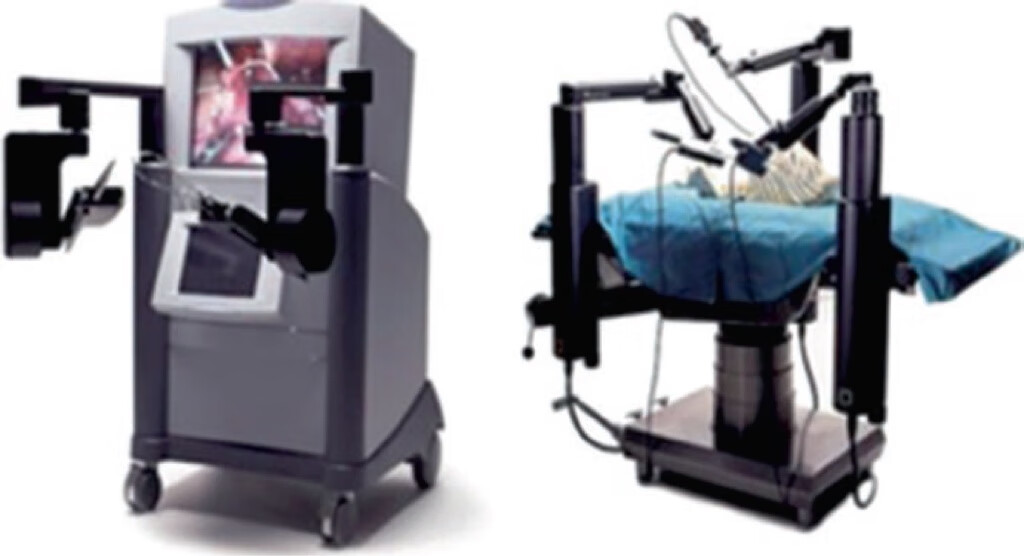
1998 年,摩星公司开发了宙斯机器人外科系统 ZEUS Robotic Surgical System ,由医生 在主控制台操纵 手术台上的三个机器臂 。此系统包括 AESOP 机器人持镜装置和 2 个 6 自由度的机器臂。初时只有二维视野,最终版提供了三维视野。首次手术是在美国克利夫兰完成输卵管再吻合术。此系统的荣耀是 2001 年完成世界首例跨大西洋远程手术。 当时马赫斯克在美国纽约,通过宙斯机器人外科系统,给身在法国斯特拉斯堡的一位女性患者行胆囊切除术。这次手术也称为 “林德伯格手术” “Lindbergh Operation” ,林德伯格是首位孤身飞越大西洋的人。
现代机器人系统
1995 年,一群科学家和医疗企业家组建了直觉外科公 司,他们来自斯坦福研究学院、麻省理工学院和国际商业机器公司( IB M ),目标是开创机器人辅助外科。其改进 SRI 系统,原型机 在动物实验时 称为“ 莱尼 Lenny ”,是年青达芬奇的呢称,也称为“蒙娜”,指达芬奇名作蒙娜丽莎。 1997 年, Himpens 和 Cadiere 用此系统在比利时 登德尔蒙德 完成首例人的胆囊切除术。经过不断改进,与原型机相比,达芬奇机器人系统有更好的操控性和人体工程学特点, 1999 年,达芬奇系统开始最后的测试。
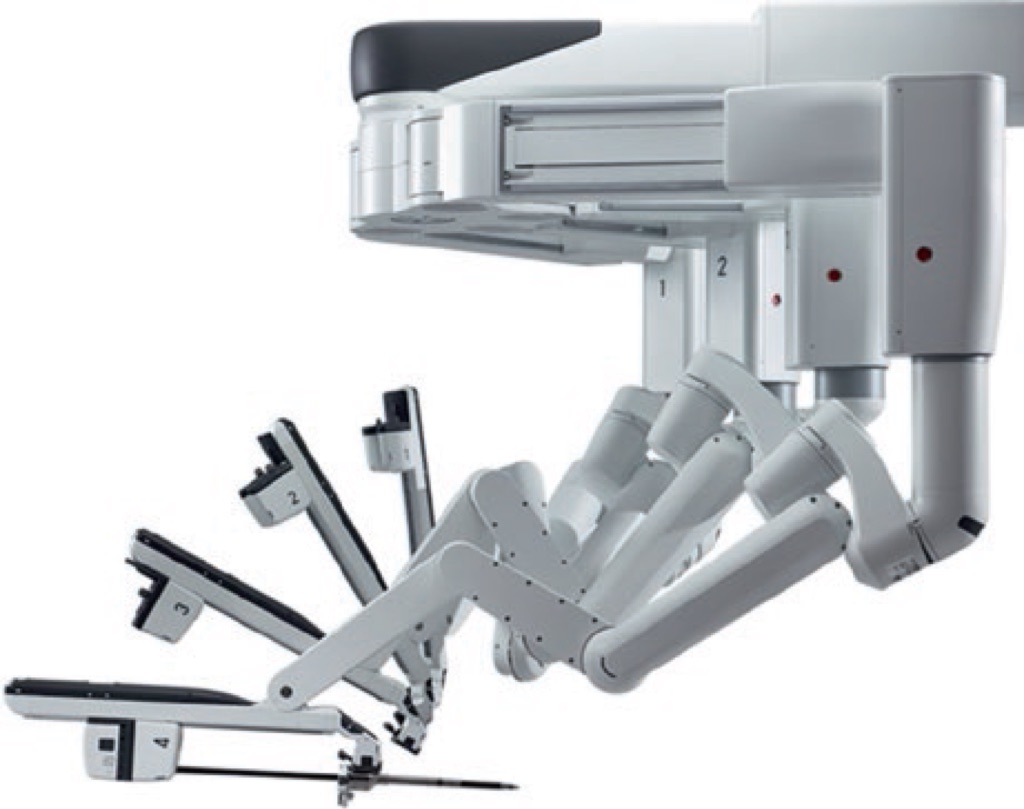
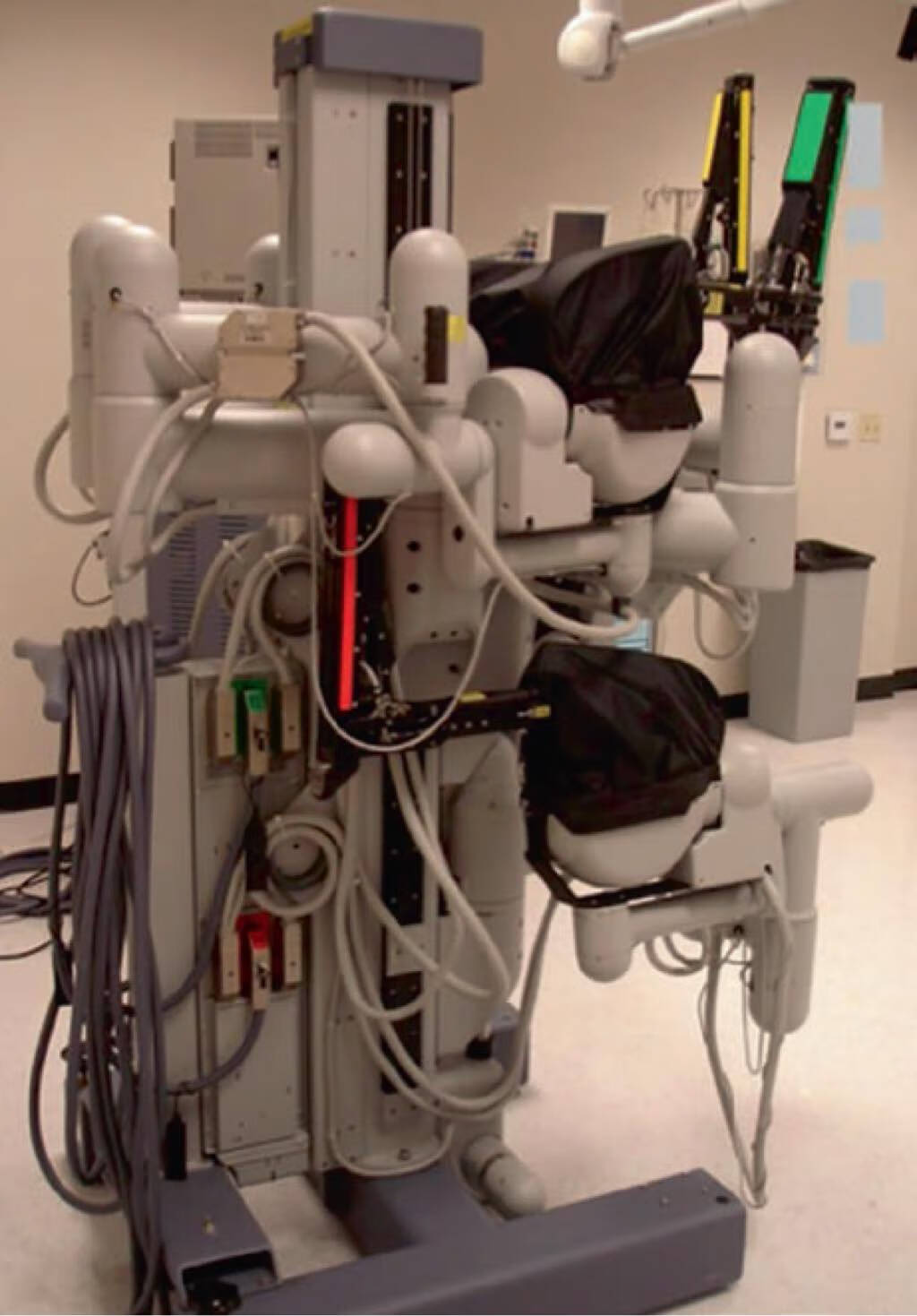
达芬奇系统包括 3 个部分:
2000 年 7 月,美国 FDA 批准达芬奇外科系统用于临床。目前为止,达芬奇系统是最先进的主从操作系统。其组成部分: a 医生控制台; b 手术台旁装置; c 成像装置,以三维形式 10 倍放大将内镜图像呈现于控制台。脚踏控制术中能量释放、镜头和转换机器臂。机器人操作时,消除动作颤抖,运动平滑精确。机器臂安装于的手术台旁装置。其中一臂安有高分辨率三 维镜头 。特制的机械腕 EndoWrist 装置安装于其他机器臂上。影像装置有光源、视频图像处理设备和主电气 / 软件处理单元。影像装置有触屏可显示内镜图像和系统设置调节。最新一代型号( da-Vinci Xi )有整合的电外科单元用于触发能量。三维视野、精细操作,以及重要的 EndoWrist 内腕技术,外科医生利用达芬奇系统更容易进行复杂的腹腔镜手术。
直视公司已开发了 4 代 da Vinci 外科系统: 2000 年,最初的达芬奇引入了三维视野、内腕 EndoWrist 技术、 和 Intuitive 动力。 2003 年,增加了第四臂。 2006 年, “da Vinci S” 加入了高分辨率 3D 内镜,流线型设计,多象限显示和视频输入 TilePro 。 2009 年, “da Vinci Si” ,更符合人体工程学的操控台设计、视觉效果提高、双控制台选择。 Firefly 荧光成像,属近红外线技术,可实时确认关键的解剖标志。可让两位外科医生合作操作达芬奇系统,交替控制机器臂,也有利于教学。






尿路结石疼痛哇哇地叫,微创手术轻松去除

机器人心脏手术:您需要了解的事


缓解泌尿系结石,值得收藏!


尿毒症:奔赴在透析之路


一图读懂肾脏的自我净化史

揭秘:机器人是怎么做手术的?

泌尿系结石,究竟谁是凶手?

外科手术的发展与未来:准备好让机械臂帮你开刀了吗?

胰腺神经内分泌肿瘤的研究进展

精神分裂症的表现有哪些?

胫骨结节骨软骨炎的治疗
儿童发育性髋关节脱位如何治疗
骨髓炎伤口长期不愈合是怎么了?
19岁,163cm,吃钙片能长高吗?
足舟骨骨软化怎么办
半月板损伤能够自愈吗?
老年人骨质疏松应该注意些什么?
滑膜炎和骨刺的治疗建议
预防骨质疏松,这个时期补钙效果最好
髓芯减压干细胞治疗股骨头坏死
如何通过鱼油和钙来改善骨质疏松症?
骨质疏松症的治疗与预防:阿法骨化醇的使用
老年人骨质疏松症的营养补充与治疗
70岁老人骨质疏松症的钙补充治疗
预防骨质疏松症:维生素D和钙的重要性
腰肩疼痛一个多月,可能是缺钙引起的骨科问题
骨力型和智佳型中成药在骨质疏松症治疗中的区别
骨骼生长停止后补钙对身高无影响
50岁女性骨质疏松症的营养管理与治疗建议
孕妇补钙:如何选择安全有效的钙补充剂?

